0769-82730118
EN
全國咨詢熱線
0769-82730118舵機帶寬測試系統設計與試驗方法研究
舵機作為無人機系統中的重要執行機構,是一個高精 度的位置伺服系統,其工作原理是接收無人機自駕儀給出 的控制指令驅動無人機舵面偏轉,改變無人機飛行姿態或飛行軌跡,以達到精確控制無人機飛行和完成規劃航線任務的目的。舵機對輸入指令的跟蹤能力直接影響著無人機的飛行控制性能,由于舵機本身的復雜性、元件參數測量的困難性以及元件參數測量的不準確性,并受環境變化、元器件 老化等因素影響,檢測舵機帶寬指標對于保證控制系統設計的有效性,提高無人機飛行時的動態品質與制導、控制性 能指標尤為重要。傳統舵機帶寬測試采用的設備儀器是頻譜分析儀,測試設備費用昂貴,采用手工記錄測試結果自動化程度較低, 測試過程費時費力為解決這些問題,國內研制了基于 虛擬儀器的舵機測試系統,實現了對舵機頻率特 更好的直觀性和易操縱性,但是該舵機測試系統的研究對象主要是針對大型的模擬舵機,由于模擬舵機控制指令為電壓信號,而數字舵機控制指令信號為 PWM信號,并且舵機負載扭矩加載系統量程較大,因此該測試系統并不適用于 小型數字舵機帶寬測試。并且,作為舵機性能指標測試的專用設備,該測試系統方案未充分利用無人機系統自身現有設備,而是重新構建了一套軟/硬件系統,需要采購硬件 設備,并基于其軟件平臺開發軟件系統,研制周期較長,費 用高,并且功能單一。FUTABA、JR和 HITEC等公司的常用舵機產品已廣 泛應用于小型無人機系統設計中,但產品說明書提供的參 數列表只包括尺寸、重量、最大偏轉速度和最大扭矩,不提供帶寬技術指標。針對該現狀和無人機控制律設計的實際需求,本文首先介紹了數字舵機帶寬測試原理和試驗方法, 并以無人機自身設備為基礎集成構建了小型數字舵機帶寬測試方案,完成軟硬件系統設計與開發,通過該測試系統對某型舵機帶寬指標進行實際測試和分析,獲得了最符合實 測結果的舵機標準近似二階數學模型和性能指標從而為 無人機舵機選型和設計人員進行制導控制系統新一輪迭代設計提供了技術支持。
1. 舵機帶寬測試方案
1.1帶寬指標
控制數字舵機進行1度幅值的正弦偏轉運動時,幅值 -3dB處的頻率值稱為舵機帶寬指標。舵機帶寬指標是由無人機本體自然頻率確定,對于靜穩定無人機一般可取 5~10倍[13-15]。對于靜不穩定無人機系統,由于主要依靠飛行控制系統保證無人機滿足飛行品質要求,因此對舵系統動態指標要求更高。
1.2測試及數據處理方法
本文采用頻域響應法測量舵機帶寬,選取頻率測試點序列,依次在每個頻率點上輸入等幅正弦信號x(t)= sinωt作為舵機激 勵信號,并對輸出信號進行取樣,根據 線性系統理論,理想情況下系統穩態響應為 y0(t)= Bsin(ωt+φ),實際工程測試中有諧波和噪聲干擾信號 N(t),即y0(t)=Bsin(ωt+φ)+N(t)。采用相關測量法對試驗原始數據進行處理。為方便計 算,暫不 考慮噪聲影響,假設N(t)=0。分別用sinωt,cosωt與y(t)進行互相關運算,有:
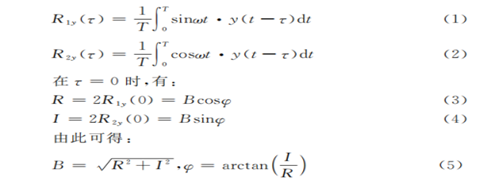
N(t)≠0時,由于三角函數的正交性與噪聲的獨 立性,相關測量法相當于以當前激勵頻率 ω為中心頻率的 帶通濾波器,隨著積分時間 T 的增加,輸出信號中的諧波和干擾信號將被濾除。實驗中采集數據為離散點序列,假 設采樣率為s,積分時間為T,則采樣點數 N 為T·s,相應的離散計算公式為:
y(k)為信號在第k 個采樣點的值,由上式可求得系統幅值增益Am 和相位φ為:

對每個實驗點都按照上式進行求取。當獲得了所有實驗點的頻率、輸入和輸出信號的幅值及二者的相位差后,即可繪制處舵機系統的波特圖或幅頻特性圖。
2.舵機帶寬測試系統設計
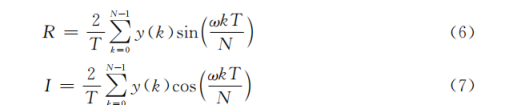
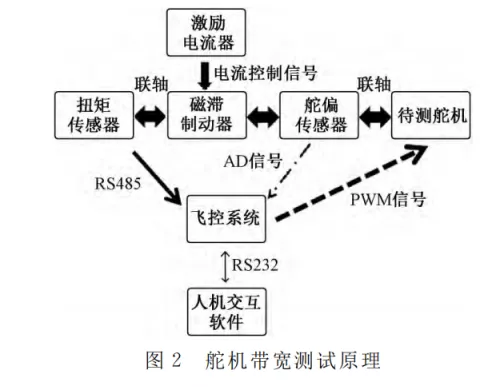
下面介紹以無人機自身設備為基礎集成構建的小型數字舵機帶寬測試方案,如圖1所示,整個舵機帶寬測試系統由硬件系統和軟件系統組成,硬件系統包括舵機測試臺架、無人機 飛控系統、待測舵機、舵偏角傳感器、磁滯制動器、扭矩傳感器 和工控機等。軟件系統包括舵機帶寬測試軟件、人機交互軟 件和數據記錄軟件,在無人機自身軟系統基礎上集成開發。
帶寬測試原理如圖2所示,扭矩傳感器、磁滯制動器、 舵偏角傳感器以及待測舵機通過聯軸器連接,以減小間隙, 并固定于舵機測試臺架上。磁滯制動器是一種優越的扭矩控制設備,利用磁制原理通過控制輸入的勵磁電流產生連續可調的負載扭矩,且控制電流和輸出扭矩具有較好的線性關系,實現舵機任意載荷譜的自動加載;扭矩傳感器用于測定舵機實際受到的扭矩;飛控系統是整個測試系統的核 心,主要功能為:1)響應人機交互軟件對舵機激勵信號的配置,包括激勵信號幅值、頻率及執行時間等;2)輸出不同頻 率的正弦激勵 PWM 信號驅動待測舵機;3)通過舵偏角傳感器實時采集舵機輸出響應;4)記錄保存各試驗點數據,包 括時間、扭矩、輸入指令以及輸出響應數據等。
測試步驟及注意事項
3.以某型 FUTABA 常用數字舵機為測試案例,簡要闡 述試驗過程中的測試步驟及注意事項。
試驗步驟如下:
1)估算待測舵機頻帶,確定激勵用的正弦信號幅值范 圍和頻率范圍,將頻率范圍等分,并繪制試驗表格,表格中 填好各試驗點的幅值和頻率值;
2)檢查確認各測試系統設備連接正常后上電;
3)標定待測舵機輸入激勵 PWM 指令和舵偏角采集輸出電壓信號與實際偏轉角度對應表;
4)設置各試驗點處待測舵機激勵輸入信號幅值、頻率和執行時間;
5)啟動舵機,記錄并保存本次試驗點響應數據;
6)重復步驟4)~5),直至所有試驗點測試完畢;
7)調節磁滯制動器控制勵磁電流輸入,給待測舵機加 載指定的鉸鏈力矩,重復步驟4)~6),完成不同負載情況下所有試驗點測試;
8)整理和分析試驗數據。整個測試過程中需要注意事項包括:1)測試數據應在 激勵正弦信號的第5個周期后采集記錄,以避免系統尚未穩定影響測量精度;2)隨著頻率的增大,防止因衰減過大導 致輸出信號不明顯,激勵正弦信號的幅值也應逐漸遞增,但須保證最大偏轉角速度不要超過舵機指標要求;3)整個測 試過程中機進行頻繁的換向操作,其溫升較快,為避免 溫升對測量結果的影響,在每個頻率點測試完之后延遲一 段時間再進行下一點的測試。
4.試驗結果與數據分析
4.1數據處理
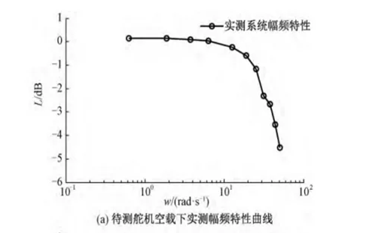
圖3所示為空載情況下0.1Hz頻率測試點原始試驗曲線,按提供的數據處理方法得到舵偏角傳感器輸出測量信號 與舵機輸入控制指令的幅值比為1.0,相位差為-3.5°。匯總各頻率測試點序列的幅頻特性和相頻特性實驗結果,如圖4所示,根據圖4實測舵機的幅值和相位差與頻率
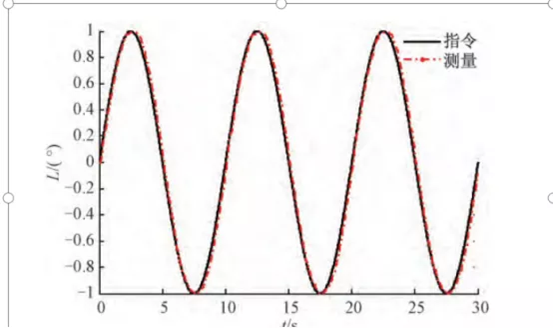
待測舵機空載下0。1Hz頻率響應試驗曲線 的曲線結果可知,結合幅頻特性和相頻特性定義,可以得到 幅值下降-3dB時待測舵機的頻率為39.14rad/s,即舵機 帶寬 ωH 為 6.23 Hz,而相位差相差 -90°時 的 頻 率 為 21.55rad/s,即舵機的相頻特性(固有頻率)ωn 為3.43Hz。

4.2 誤差分析
不考慮舵機的死區和非線性,一般可以采用標準的二階模型來模擬舵機真實響應特性:

按照上述標準二階模型,可以計算舵機帶寬ωH 與固有頻率關系理論上為:

因此,當獲得二階等效模型的固有頻率ωn 和阻尼比ξ 后,其幅頻特性、相頻特性及帶寬就確定了。
對于二階等效模型,阻尼比ξ 一般介于0到1,根 據 式(11),舵機的帶寬理論上介與固有頻的0至倍之間,然而4.1節根據原始試驗數據測得舵機幅頻特性(帶 寬)與相頻特(固有頻率)比 值 等 于1.82,不屬于上述理論范圍,經分析研究認為:真實測量系統存在時間延遲,這對系統的幅頻特性影響較小,因此幅頻特性結過不需要修正,但系統延時對舵機相位滯后的影響很大,導致測得的相位誤差較大,因此需要對相位差進行修正和補償。
4.3延時修正和試驗結果
為得到舵機實測的近似標準二階模型,需要修正系統相位差,具體步驟如下:
1)假設延遲時間,修正各測試頻率下測試相位差;
2)由測試頻率與修正后的相位差插值得到系統相頻特性(固有頻率);
3)計算得到系統阻尼比,確定系統二階模型;
4)計算不同頻率下系統二階模型幅頻特性和相頻特性;
5)分別計算實測結果與對應頻率下二階模型對應頻率下的幅頻特性與相頻特性差值的平方和;
6)改變延遲時間,尋求差值平方和最小時對應的延遲時間;
7)繪制實測結果與二階模型bode圖驗證計算結果。
按照上述修正方案,通 過 MATLAB 尋優算法得到系 統延遲時間為46ms,
舵機標準二階模型固有頻率ωn 為 48.63rad/s,阻尼比ξ為0.85時,其幅頻和相頻特性曲線與實測系統差值平方和最小,兩者對比曲線如圖5所示,從 圖5中可以看出二者曲線基本吻合,表明上述修正方案的正確性與可行性。

按照上述系統延遲修正方法對所有原始試驗數據進行了處理分析,匯總得到該型舵機最終試驗結果如表1所示,根據表1結果可知,在有負載情況下待測舵機帶寬和阻尼比技術指標略有下降。

5.結論
本文針對常用數字舵機產品未提供舵機帶寬技術指標的現狀和無人機控制律設計的實際需求,兼顧技術先進性和工程實用性,基于無人機自身軟硬件設備構建了小型數字舵機帶寬測試系統,完成了測試系統的軟硬件架構設計與集成,利用該測試系統對小型無人機常用數字舵機空載 和帶載情況下的帶寬指標進行了檢測,考慮到實際測量系統存在時間延遲,修正并尋求了最符合實測結果的近似標 準二階數學模型,建立了常用舵機實際性能數據庫,為后續無人機研制和控制律優化設計提供了技術支持。實際工程 應用表明以無人機自身軟/硬件系統為基礎構建的舵機帶寬測試系統方案可行,功能完備,可靠性好,成本低,為小型數字舵機帶寬指標檢測提供一種新手段。
參考文獻:[1] 張西濤,江飛鴻,趙海.飛控系統極限環抑制對舵機性 能的需求計算[J].飛行力學,
2009,27(4):39-42.
[2] 孟捷,徐浩軍,李 大 偉.舵 機 帶 寬 對Ⅱ型 PIO 預測 影 響研究[J].系統仿真學報,2011,23(4):813-816.
[3] 劉艷,高 正 紅,張 星 雨.基于人機閉環穩定性的舵機速 率限制邊界[J].航空工程進展,2018,9(1):28-34.
[4] 習趙軍.基于虛擬儀器的多路舵機測試系統[D].武漢:華中科技大學,2007.
[5] 王文輝.基于虛擬儀器技術的舵機振動測試系統研制[D].長沙:國防科學技術大學,2013.
[6] 牛海發,牛明博.一種基于虛擬儀器的舵機測試系統 研制[J].實驗技術與管理,2007,24(2):67-71.
[7] 譚營,許化龍,吳琳.基于 LabVIEW 的舵機測試系統設 計[J].微計算機信息,2007(31):133-134,286.
[8] 蘇繼杰,鮑傳美,鄭幸,等.虛擬儀器的無人機舵機測試系統設計與實現[J].火 力 與 指 揮 控 制,2008,33(S2):164-165,173.
[9] 崔偉,趙波.便攜式舵機測試系統的設計與應用[J]. 宇航計測技術,2010,30(3):57-61.
[10] 毛先柏,謝東,李昌.基于支持向量機的舵機帶寬測 試[J].計算機測量與控制,2007(11:1482-1483,1518.




微信掃一掃 立即關注

掃碼下載張力測控畫冊